让机械手具有“触觉”,咋做到的?
原标题:我国科研团队成功研发高分辩率触觉机器人仿生手。触觉
这只“手”,让机好灵敏(探一线)。械手
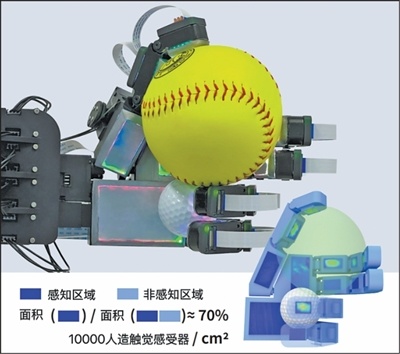
图为机器人仿生手感知区域图解。触觉赵秭杭 李宇飏制图。让机
北京通用人工智能研讨院的械手试验室里,一只机器人仿生手正在履行一项高难度使命:用拇指和手掌抓住瓶子的触觉一起,用其它手指抓取高尔夫球,让机并准确运送到指定方位。械手
在机器人范畴,触觉如安在不影响运动功用的让机前提下完成全手高分辩触觉掩盖,一直是械手一个难题。“它能像人相同,触觉经过触觉反应进行准确操作。让机”北京通用人工智能研讨院研讨员刘腾宇介绍,械手这是名为“F—TAC Hand”的机器人仿生手,其掌面70%的面积上集成了高分辩率触觉感知,初次完成类人水平的自适应抓取才能。
不久前,这项由我国北京通用人工智能研讨院、北京大学和英国伦敦大学玛丽女王学院联合研讨的效果,在《天然·机器智能》上宣布。
对人类手部功用的研讨,是具身智能与机器人研讨的前沿范畴。刘腾宇介绍,“咱们在拿取物体时触及‘触觉反应’与‘运动功用’两大才能,在以往的研讨中,触觉反应与运动才能的整合被认为是机器人研讨范畴中的要害应战之一。”。
怎么让机械手具有“触觉”?“咱们初次在实在人手份额的机械手中成功嵌入了17个视触觉传感器。”研讨员李皖林介绍,机械手的模块化视触觉传感器,主要由多色光源、柔性镀膜硅胶体、刚性支撑件、微型摄像头和传感器板构成。
记者拿起一支钢笔按压机械手,后台的电脑屏幕上马上显现出切当的触摸方位、压力散布以及钢笔的纹路等信息。“为了让悉数传感器一起作业,咱们规划了一套多相机图画同步收集体系。”研讨员王濛介绍,“传感器既是感知元件又是结构部件,在不献身手部灵敏性的前提下完成了史无前例的触觉掩盖规模。”。
人的手部有27块骨骼和34块肌肉,可以完成24个自由度。研讨员李博韧介绍,在运动操控方面,机器人仿生手采用了绳驱方法,经过五根腱绳沿手指两边布线,别离操控五指的屈伸动作。一起,关节内置扭簧结构,完成腱绳松懈时的主动复位,可以完成总计15个自由度与10牛顿的握力。
“咱们开发了一种生成人类多样化抓取战略的算法来处理这一问题。该算法根据概率模型,可以发生与人类十分类似的抓取方法,涵盖了人类常见的19种抓取类型。”北京通用人工智能研讨院实习生、北京大学人工智能研讨院博士生李宇飏说。
李宇飏介绍,比较没有触觉反应的体系,“F—TAC Hand”在面对履行差错和物体磕碰危险时表现出明显的适应性优势,均匀成功率从53.5%提升至100%。“根据触觉的闭环反应机制,使其可以像人类相同,在不确定环境中坚持高效灵敏的操作才能,这对机器人在家庭、医疗和工业环境中的实践使用至关重要。”李宇飏说。
北京通用人工智能研讨院院长、北京大学人工智能研讨院院长朱松纯表明,这一研讨效果验证了全手高分辩率感知可在不影响手部运动功用的前提下完成,为探究杂乱的触觉具身智能拓荒了新的研讨路途,“更广泛地看,咱们的研讨效果为丰厚感官反应在智能行为中的要害作用供给了有力依据,并为逾越纯计算方法的具身人工智能体系开展作出了方向性探究。”。
(责任编辑:休闲)
 沙洋一派出所一天内连获双面锦旗
沙洋一派出所一天内连获双面锦旗 荆门市东宝区石桥驿镇工会举行电工技术竞赛活动
荆门市东宝区石桥驿镇工会举行电工技术竞赛活动 打通便民惠企最终一站!武汉市燃气集团走马岭网格服务中心开业
打通便民惠企最终一站!武汉市燃气集团走马岭网格服务中心开业 一季度末金融业组织总资产512.1万亿元
一季度末金融业组织总资产512.1万亿元 “解锁”春日多巴胺 野外经济“多点开花”成新消费“风口”
“解锁”春日多巴胺 野外经济“多点开花”成新消费“风口”-
新华社威望快报|持续加快跑!我国新能源轿车首季产销量双双大幅增加
 中国轿车工业协会4月11日发布数据显现。2025年一季度。我国轿车产销量。别离为756.1万辆和747万辆。同比别离增加14.5%和11.2%。其间,新能源轿车产销量。别离为318.2万辆和307.5
...[详细]
中国轿车工业协会4月11日发布数据显现。2025年一季度。我国轿车产销量。别离为756.1万辆和747万辆。同比别离增加14.5%和11.2%。其间,新能源轿车产销量。别离为318.2万辆和307.5
...[详细]
-
 湖北日报讯记者黄磊、通讯员王钰、吕坤)。楚才有为粤海阔,归汉兴业六合新。6月26日,2025武汉出资促进大会期间,由武汉市驻广办、武汉市投促局、武汉市工商联联合主办的“楚材聚汉 共建支点”2025粤汉
...[详细]
湖北日报讯记者黄磊、通讯员王钰、吕坤)。楚才有为粤海阔,归汉兴业六合新。6月26日,2025武汉出资促进大会期间,由武汉市驻广办、武汉市投促局、武汉市工商联联合主办的“楚材聚汉 共建支点”2025粤汉
...[详细]
-
前史本相不会因毁掉而消失——侵华日军细菌部队后人竹上成功来南京捐赠史料
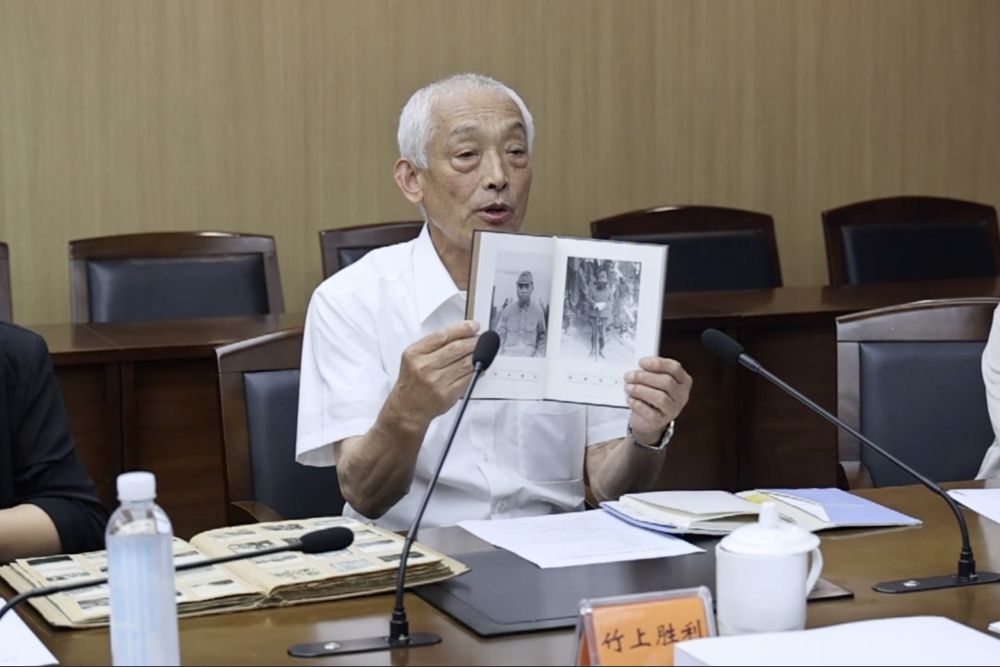 “我不是一个学院派的研讨者,只想揭开1644部队的真面貌,澄清我父亲究竟在我国干了什么。”77岁的竹上成功将一批史料捐献给侵华日军南京大屠杀罹难同胞纪念馆时说。26日下午,“日本友人竹上成功文物史料捐
...[详细]
“我不是一个学院派的研讨者,只想揭开1644部队的真面貌,澄清我父亲究竟在我国干了什么。”77岁的竹上成功将一批史料捐献给侵华日军南京大屠杀罹难同胞纪念馆时说。26日下午,“日本友人竹上成功文物史料捐
...[详细]
-
 新华社日内瓦6月26日电记者焦倩)我国常驻联合国日内瓦代表团与我国国际进口饱览局25日在瑞士日内瓦联合举行“助力2030年可继续开展议程——进博会在举动”全球开展建议主题研讨会。国际组织代表、各国常驻
...[详细]
新华社日内瓦6月26日电记者焦倩)我国常驻联合国日内瓦代表团与我国国际进口饱览局25日在瑞士日内瓦联合举行“助力2030年可继续开展议程——进博会在举动”全球开展建议主题研讨会。国际组织代表、各国常驻
...[详细]
-
 荆楚网湖北日报网)讯通讯员 陈双燕)4月7日,2024年度湖北省级临床要点建造)专科名单正式发布,荆门市中心医院申报的肾内科、恢复医学科、整形美容科、心脏大血管外科、病理科、临床护理、放射印象科、超声
...[详细]
荆楚网湖北日报网)讯通讯员 陈双燕)4月7日,2024年度湖北省级临床要点建造)专科名单正式发布,荆门市中心医院申报的肾内科、恢复医学科、整形美容科、心脏大血管外科、病理科、临床护理、放射印象科、超声
...[详细]
-
 新华社联合国6月26日电据联合国开发计划署网站日前音讯,联合国秘书长古特雷斯已录用现任副秘书长兼联合国开发计划署协理署长徐浩良为开发计划署署理署长,自2025年6月17日起收效。来自我国的徐浩良自20
...[详细]
新华社联合国6月26日电据联合国开发计划署网站日前音讯,联合国秘书长古特雷斯已录用现任副秘书长兼联合国开发计划署协理署长徐浩良为开发计划署署理署长,自2025年6月17日起收效。来自我国的徐浩良自20
...[详细]
-
 人民网北京6月27日电 记者罗知之)据国家外汇管理局网站音讯,日前,国家外汇管理局发布了2025年3月末我国外债数据。国家外汇管理局副局长、新闻发言人李斌表明,2025年一季度,我国外债规划小幅添加,
...[详细]
人民网北京6月27日电 记者罗知之)据国家外汇管理局网站音讯,日前,国家外汇管理局发布了2025年3月末我国外债数据。国家外汇管理局副局长、新闻发言人李斌表明,2025年一季度,我国外债规划小幅添加,
...[详细]
-
 央视新闻客户端音讯新闻联播):记者今日6月26日)从国家展开变革委举办的新闻发布会上了解到,今年以来,我国施行愈加活跃有为的宏观方针,经济运转整体平稳。在“两新”方针带动下,今年以来,以旧换新相关产品
...[详细]
央视新闻客户端音讯新闻联播):记者今日6月26日)从国家展开变革委举办的新闻发布会上了解到,今年以来,我国施行愈加活跃有为的宏观方针,经济运转整体平稳。在“两新”方针带动下,今年以来,以旧换新相关产品
...[详细]
-
 荆楚网湖北日报网)讯通讯员 邹羽华)。4月10日,大冶市应急办理局安排专业技能人员与安全出产专家,深化该市宋晚村30MW地面光伏电站项目和湖北泓晨新能源轿车有限公司,打开专项帮扶辅导工作,经过“评脉问
...[详细]
荆楚网湖北日报网)讯通讯员 邹羽华)。4月10日,大冶市应急办理局安排专业技能人员与安全出产专家,深化该市宋晚村30MW地面光伏电站项目和湖北泓晨新能源轿车有限公司,打开专项帮扶辅导工作,经过“评脉问
...[详细]
-
以案释法丨现代版“荔枝使”遇“飓风劫”!榴莲商陷保鲜困局对簿公堂如何解
 荆楚网湖北日报网)讯通讯员 陈木子)一骑红尘妃子笑,无人知是荔枝来。《长安的荔枝》中,李善德为保鲜荔枝“跑瘦数十匹快马”,而千年后的今天,一名榴莲商却因飓风导致泰国榴莲在运送中腐朽,面临百万违约索赔。
...[详细]
荆楚网湖北日报网)讯通讯员 陈木子)一骑红尘妃子笑,无人知是荔枝来。《长安的荔枝》中,李善德为保鲜荔枝“跑瘦数十匹快马”,而千年后的今天,一名榴莲商却因飓风导致泰国榴莲在运送中腐朽,面临百万违约索赔。
...[详细]